品牌:Feizhuo
起订:1件
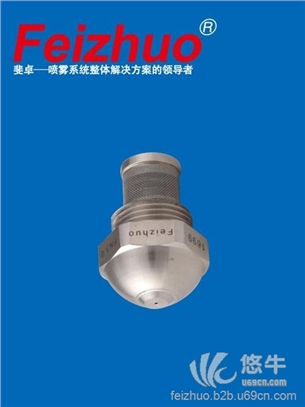
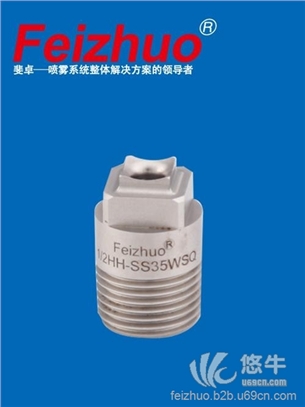
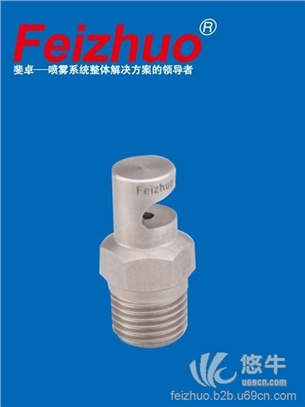
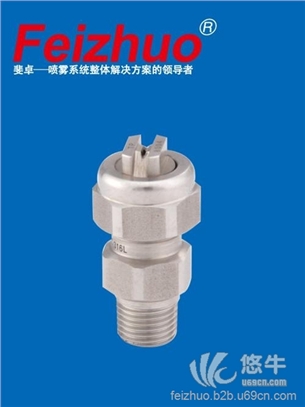
干雾抑尘喷嘴主要用来振动赛除尘,卸料槽除尘,输送带除尘;
超声波干雾抑尘喷嘴是利用空气驱动液体穿过喷嘴的超声波区域来达到雾化效果的喷嘴。
超声波干雾抑尘喷嘴喷出来的雾粒直径1-10微米大小的颗粒。在控制5微米以下的空气粉尘时,吸入浮尘方面具有非常好的效果。
超声波干雾抑尘喷嘴喷出的水雾的方向很准确,它的搜索速度快,能快速得控制、屏蔽、切断粉尘的扩散。
超声波干雾抑尘喷嘴的出雾量和雾索长度都大。而且喷嘴的出雾量、雾索长度都可以调节。

超声波雾化喷嘴的特性
1:可以雾化任何液体
2:功耗低,雾化量大,节能,环保
3:无插件,无磨损,无噪音,无压力,无机芯部件。
4:可以根据雾化量的多少来对喷嘴进行随机组合
5:使用高性能的钛和不锈钢为制作材料。
超声波雾化器(雾化喷嘴)利用超声波能量来将水或各种液体分裂为几微米至100微米以上的粒子。 它的这种功能被用来加湿空气,造粒和混合液体,,促进化学反应,涂料等。
在高功率的超声波雾化技术下,所以能量都由垂直传感器产生。 整机由超声波换能器,增压器和喇叭(超声波发生器)组成。 其特点是工作频率低,功率大,雾化效率高,单个传感器的雾量可大可小,一单元的传感器的雾化量。雾量超过100L / h的为中等流量,它可以喷污水,化学液,油粘液。 雾量可随意调节,雾化喷嘴主要应用于工业领域。

斐卓FeizhuoFZPW-86自动喷淋清洗装置
一、 简述
FZPW系列自动喷淋清洗装置是斐卓推出的高技术型产品。专用于造纸网部移动喷淋装置。本产品具有多种型号可供选择。FZPW系列自动喷淋清洗装置是由程序控制器、数控电动驱动器、密封装置、喷淋杆等组成,真正实现可调速可调行程,是与国际同步的先进产品。
工作原理:
1, 装置在速度设定值和行程确定值的要求下编程,电机在控制系统的指挥下带动丝杆匀速运行。
2,系统分为均速模式和DCS模式运行.均速模式为手动输入速度及移动距离;在DCS模式下,装置根据4-20MA车速信号跟随带动丝杆变速运行。该跟随运动的原理是主机运行一周,喷淋装置运行1毫米,假设主机速度为V米/分钟,网毯周长为L米,则主机速度为V/L转/分钟,主机运行1转,喷淋运行1MM,故知喷淋的速度为V/L MM/MIN。
数控电动驱动装置的特点:
1.数控电动驱动装置拥有工业设计的独创性、前沿性、完善性:
A、数控电动驱动器,移动行程:0-200㎜,能够分别适用75-300㎜的喷嘴间距。
B. FZPW-86型驱动电机较大输出扭矩为12N.M
C、性能可靠,该数控装置采用机电一体化设计和可靠的密封技术,较其他换向方式,制造精度高,运行平稳可靠。
2.数控电动驱动装置与普通驱动器比较:
目前市场上普通驱动器所存大的问题:
A、水动驱动器受水质的影响,容易被堵死而不工作,耗水量大。
B、气动驱动器受空气质量的影响,加注机油润滑的忽略而死机不工作,并且频率不稳定,耗气量大。
C、传统的电动凸轮减速驱动器为正统变速运动,洗涤质量差,有不均匀条纹状。
D、直线电动驱动器仅为匀速直线运动,不可调速。洗涤痕迹为网毯上的曲线运动,仍出现不均匀痕迹。
E、变频电动驱动器虽为直线调速的匀速运动,但不配合车速,和网毯长度的
变动而调速,不可停顿洗涤。洗涤在网毯上的痕迹仍为曲线运动,仍出现不均匀。
3.技术参数:
A、适用车速50-2000m/min;行程:100-200mm、毛毯长度5-200m。
B、电源:单相220V;功率:800W;电流4A。
二、安装:
1、安装原则:
A、直连式安装方式,驱动器与喷淋杆安装同心平行。
B、安装驱动器时,应注意(驱动器丝杆已经缩到底):安装时应把伸出行程(行程200mm)算在内,否则高压喷水管会碰到支架或高压喷水管某一个喷头会喷到外面。
C、喷嘴到网或毛毯的距离应在30-120mm之间,应垂直于网或毛毯,在它往复行程中调整位置到正好冲洗毛毯边缘。
D、安装时要保证喷水管轴线与纸机导辊轴线相互平行。
E、喷淋杆安装好后,要保证数控电动驱动器带动高压喷水管部件能在全行程自由往复运动。
三.接线
FZPW-86型控制器电气原理图如下:
FZPW-86型控制器接线说明:
接线详解:
1,
L,N,PE,为供电电源进线端,要求进线为220VAC交流电源,必须带接地线,进线可采用RVV3*1.5平方护套软线。
2,
L1为受柜体外部急停开关控制的220VAC受控电源的相线,零线为N1
3,
L12,N1,为柜体内24VDC开关电源供电,也受急停控制。
4,
24P,24N这两个端子是直流24V电源,为外部零点接近开关;外部车速检测接近开关提供24VDC供电电源。
5,
X0,驱动电机零点接近开关输入线,零点接近开关标准为3线制,棕色接24P,蓝色接24N,黑色接X0.
6,
X1R,外部DCS远程启动信号,该端子和24N组合成输入一组干节点信号供远程DCS使用
7,
X2,零点方向超程保护信号。
8,
Y2R1,Y2R2组成一组干接点信号输出给远程DCS,表明系统已经启动正在自动运行。
9,
IN1,GND两个端子***远程DCS给定的4-20MA电流信号,根据信号判断主机车速,实现本装置跟随运动。
10, A+,A-,B+,B-,驱动电机为86型混合式步进电机,出线为4线制,其中A+与A-为同相绕组,B+,B-为同相绕组,检查同相绕组的方法如下:将万用表的档位打到通断档,量4根线头的两两之间,如有2个头是通的,则两根线头为同相,反之若不同则为异相。