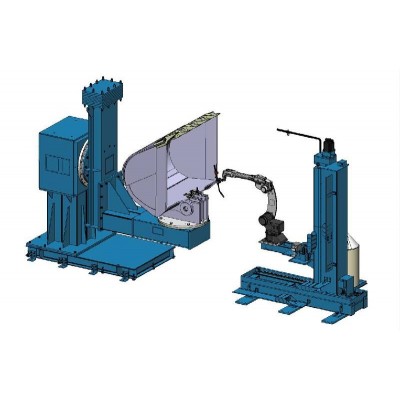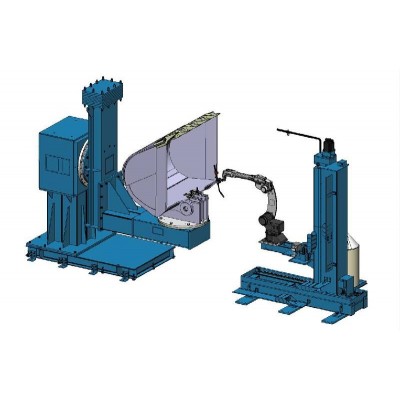


用途:
用于挖掘机挖斗的自动化焊接。
机器人工作简述:
l 本工作站采用单机器人单工位的焊接方式。由于工件焊缝四周分布,机器人作业范围有限,因此将焊接工件放在和机器人协调运动的变位机上,
l 工作站主要包括弧焊机器人、焊接电源、焊接变位机、移动滑台、清枪剪丝机构、系统集成控制柜等组成。
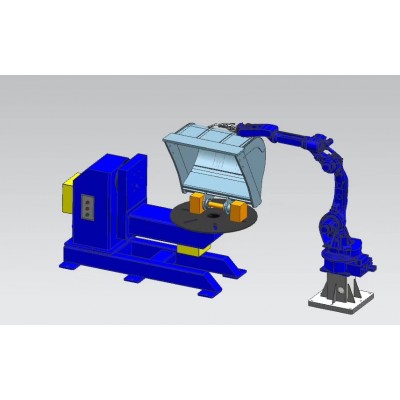
特点:
l 具有丰富的接触传感功能和高性能的电弧跟踪功能,适用于各种焊缝形式的焊接。
l 多层多道焊接专家数据库功能,节省编程时间,提高工作效率。
l 通过对机器人、移动装置、变位机的联动控制,大部分焊缝均可处于船型位焊接,圆角部位焊缝实现连续焊接,提高焊接质量。