用途:
用于挖掘机斗杆的自动化焊接
机器人工作站简述:
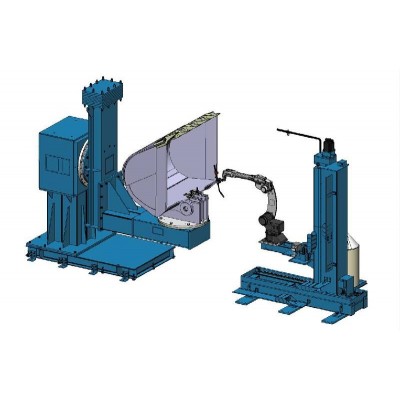
l 本工作站采用单机器人单工位的焊接方式。由于工件焊缝四周分布,机器人作业范围有限,因此将焊接工件放在和机器人协调运动的变位机上。
l 该工作站由弧焊机器人、焊接电源、机器人直线行走滑台、工件翻转变位机、水冷焊枪、清枪剪丝器、桶装焊丝及外围安全防护网等部分组成。
主要特点:
l 具有丰富的接触传感功能和***的电弧跟踪功能,适用于各种焊缝形式的焊接;
l 多层多道焊接***数据库功能,大幅节省编程时间,提高工作效率;
l 坡口宽度跟踪功能应用,保证圆弧部位焊接质量;
变位机从动端设有滑动调整机构,可适应工件长度变化。
l 该工作站具有寻位传感器、电弧传感器、多层多道等功能。可有效解决中厚板焊接中工件一致性差、焊角宽、熔深大等工艺要求。
l 该工作站吊装式和正转式行走滑台两种结构类型,具有可长期进行焊接作业、保证焊接作业的高生产率、高质量和高稳定性等特点。