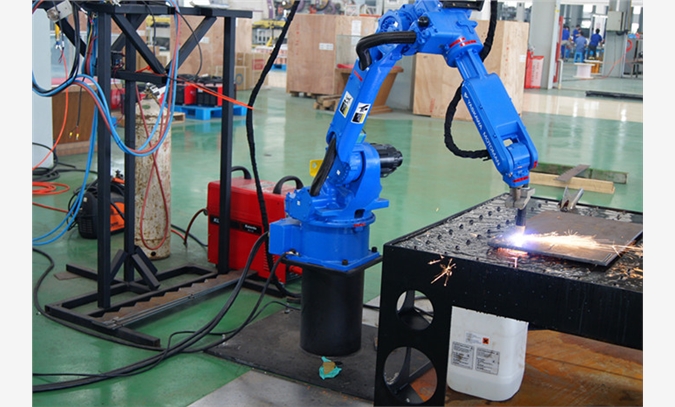
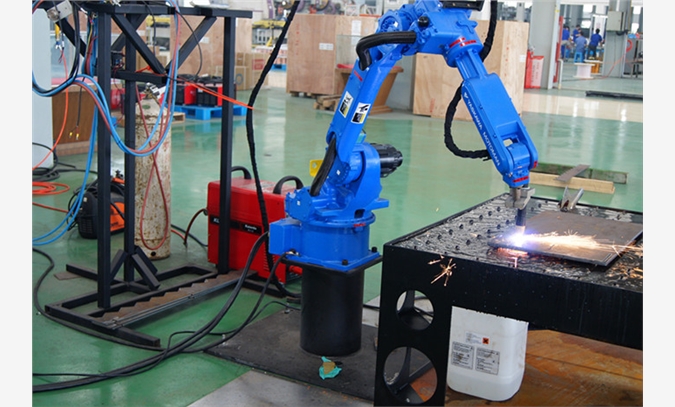
生产线机器人系统的构成:
该生产线主要用于电力铁塔底座的生产,在选择生产线设备时,需要考虑的主要内容包括:
1、提高生产效率,满足用户生产要求,达到预期产量。
2、生产线柔性化,可实现短时间内在多个产品类型之间快速切换。
3、以高度自动化降低工人劳动强度,改善工作环境。
4、提升焊缝的外观及产品的稳定性,增加用户产品在同行业内的市 场竞争力。
总体设计思路:
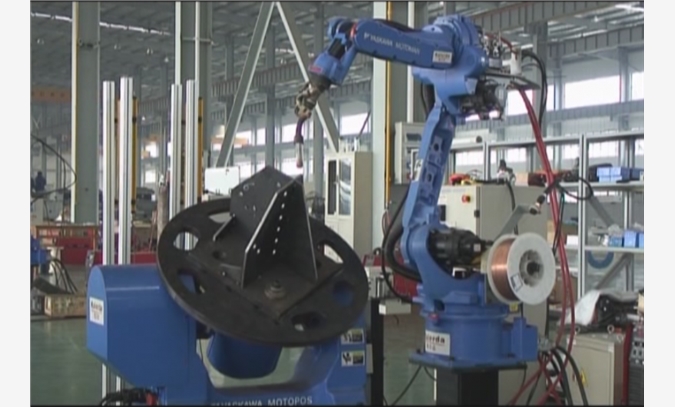
1、每套工作站配置一台德国KUKA(库卡)公司的KR5型机器人及一套 KEMMPI焊接电源系统,双轴变位机,兼顾了生产效率和系统积极性性。
2、根据其结构特点,我们采用三工位焊接,机器人在一个平台上焊接时,员工可在另一个平台上拆卸已焊接完成的产品并装夹另一组待焊接的零件,从而最大限度地提高焊接效率和设备利用率。客户可依据实际生产情况,在工作站中的一个焊接平台上焊接其中一种型号的产品,而在另一个平台上焊接另一种型号的产品,也可以在两个平台上焊接同一种型号产品。当要焊接其它型号产品时,只需更换相应的焊接夹具和选定焊接程序即可。
主要技术特点:
1、机器人位于两个焊接平台的对称中心线上,其运动范围覆盖整个焊接区域,确保焊枪的可达性良好;
2、为适应产品的多样性,采用两个焊接变位机和多套焊接夹具自由组合;实现塔脚焊接的机
- 品牌/型号:凯尔达/MA1400
- 品牌:凯尔达
- 型号:MA1400
- 驱动形式:电动
- 负载持续率:60%
- 产品别名:焊接机器人
1、尺寸及动作范围

2、机械臂标准规格

特点:
1.电缆内置于机械臂内和底座内,从而节省空间。密度配置,还能轻松回避夹具与工件的干涉。
2.以世界最快的动作速度,缩短焊接循环时间,在靠近焊接部分次数多,机器人移动距离长的工程中,能发挥很大的效果。
3.高生产效率 弧焊机器人MOTOMAN-MA1400 可搬重量3kg,最大伸长度1434mm机器人系统连接图