
主要设备技术参数
1、弧焊机器人、控制柜主要技术参数
弧焊机器人MA1400
项目 规格
控制轴 6轴
放置方式 地装、壁挂、吊装
动作范围 最大到达距离 1434mm
最大动作速度(运动范围) J1轴旋转 220°/sec(运动范围±170°)
J2轴旋转 200°/sec(运动范围-90°至+155°)
J3轴旋转 220°/sec(运动范围-175°至+190°)
J4轴手臂旋转 410°/sec(运动范围 ±150°)
J5轴手臂旋转 410°/sec(运动范围-45°至+180°)
J6轴手臂旋转 610°/sec(运动范围 ±200°)
工具中心最大负载 3 kg
重复精度 ±0.08mm以内
机器人本体重量 130kg
安装环境 周围温度:0至45℃,
湿度20%RH~90%RH(不结露)
操作界面 中文界面
u 运动范围达1434mm,大于同类其他品牌机器人,能够焊接更大范围内的焊缝;
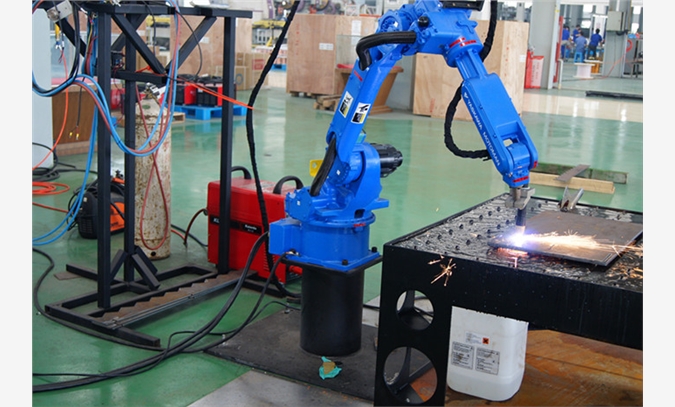
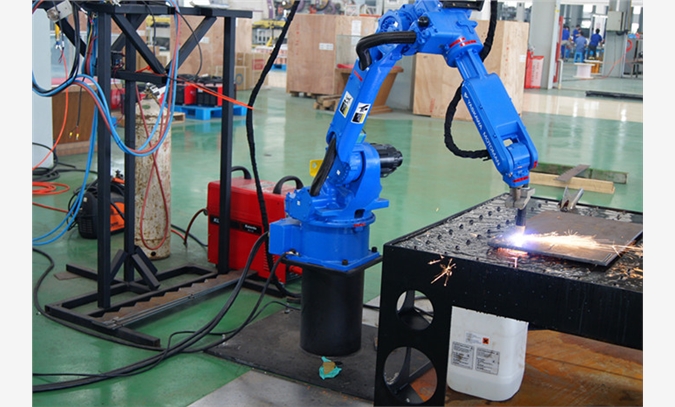
u 采用同轴焊枪、内置焊接电缆方式,防止焊接电缆与机器人手臂干涉,使机器人更加灵活,如下左图;
u 机器人末端姿态变化时,焊接电缆弯曲小,保障送丝平稳,保证始终具有良好的焊接质量(如下右图);
u 高质量的伺服电机,更高的机器人运动速度,比其他品牌同类型机器人速度高出30~40%,可以以更短的生产效率、实现更高的生产效率。
u 机器人采用安川的扁平型交流伺服电机,结构紧凑、响应快、可靠性高、运动平滑灵活,效率高,动作范围大。
u 机器人轻便,能够以更高加速度运行,减少机器人空载运行时间,进一步提供机器人焊接生产的效率。
机器人控制柜DX100
项目 规格
程序容量 任务:200,000步,10,000程序
输入输出 专用:23入,5出
通用:40入,40出
可扩展至:2048入2048出
扩展槽 PCI插槽;
2个主CPU,
1个伺服CPU
1个传感器的外部插槽
接口 1个LAN
RS-232C
最多可控联动轴 最多可扩充60个
可实现多机器人协作
安装环境 使用温度:0至+45℃,
存储温度:-10~60℃
湿度<90%RH(不结露)
操作界面 中文界面
输入电压 3相AC220V +10% ,-15% 50~60Hz
功率 3KVA
安全等级 IP23
尺寸 425(W)×450(D)×1200(H)
可扩展3个外部轴
u 大程序容量、更多的输入输出,使得机器人能够满足更复杂的、更多类型的工件焊接;
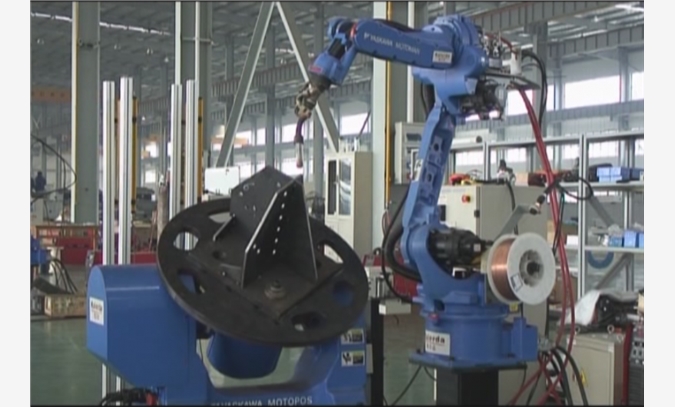
u 新的控制方法,节省能源,见下左图;快速焊接控制,提高焊接效率,见下右图;
u 宽度减小,节省了控制柜安装空间;
u 开放的焊接电源接口,适应多种焊接电源;
u 可配置多种焊接文件,适应不同焊接工艺;
u 可在焊接过程中实时调整焊接工艺;
u 具有多种不同摆动功能,摆动焊接方向、幅度、停留时间等可供设置。
机器人示教盒
项目 规格
尺寸 169(W)×315(H)×50(D)
重量 0.990kg
安全开关 三态安全开关
电缆 8m
显示 640×480像素彩色LCD,触摸屏
中文界面
IP等级 IP65
u 手控盒上有调整运行模式,启动、急停按钮,可通过手控盒进行模式更改,并直接机器人再现运行,可节省机器人调试时间;
u 具有专用按钮,如命令调用按钮、插补模式按钮、起弧/熄弧按钮、点动送丝/退丝按钮,方便编程和调试。
u 可进行多窗口显示;实时显示机器人位置、输入输出等;
u 具有直线、圆弧、S曲线插补方式,满足复杂的曲线焊接,比如管管相交的相贯线焊缝;
u 具有重复起弧、断弧再引弧功能;
u 具有运动程序平移、旋转、镜像等功能。
安川机器人MA1400
1/5
安川机器人MA1400
¥1.00/台
2014-07-02 10:0483分享0询价
参数
- 日本安川品牌
- 1台起订
- 武汉产地
湖北 武汉
0天内发货
0台
产品参数
- 日本安川
- 湖北 武汉
- 1台
产品详情

在线留言
相关公司
店铺最新




- 安川机器人MA1400
- ¥1.00
 在线问
在线问
最近来访记录
美国 加利福尼亚州圣克拉拉县山景市谷歌公司网友 2025-05-02 01:03 用安卓手机在谷歌浏览器上访问了本页
美国 加利福尼亚州圣克拉拉县山景市谷歌公司网友 2025-05-01 02:47 用安卓手机在谷歌浏览器上访问了本页
北京市网友 2025-01-14 00:59 用安卓手机在谷歌浏览器上访问了本页
美国网友 2024-12-27 01:27 用Win10电脑在谷歌浏览器上访问了本页
河北省石家庄市网友 2024-12-25 21:10 用安卓手机在Safari上访问了本页
河北省石家庄市网友 2024-12-24 10:15 用安卓手机在Safari上访问了本页
河北省张家口市网友 2024-12-23 08:32 用安卓手机在Safari上访问了本页
上海市徐汇区漕河泾数据中心网友 2024-11-02 01:01 用Win10电脑在谷歌浏览器上访问了本页